Управляемый катетер для головного мозга
Управляемый катетер, который может ориентироваться в извилистой структуре сосудистой сети головного мозга, придумала команда специалистов Калифорнийского университета в Сан-Диего (UCSD), США. На создание этого устройства ученых вдохновили тончайшие структуры, встречающиеся в природе, включая жгутики (флагеллы) и ноги насекомых. В устройстве используются принципы «мягкой робототехники», на основе которых была создана гидравлическая система управления движением, заключенная в крошечный катетер из силиконовой резины. Исследователи UCSD надеются, что эта технология позволит клиницистам лечить участки сосудистой сети, до которых в настоящее время невозможно добраться.
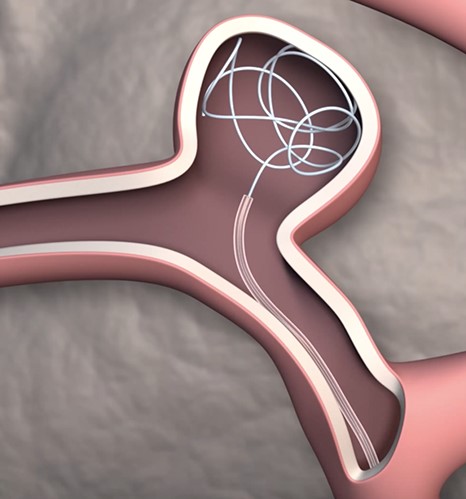
Лечение внутричерепных аневризмов порой представляют трудную задачу: примерно в 25% случаев они неоперабельны из-за их недоступного расположения в извилистой сети сосудов головного мозга. В настоящее время врачи используют проволочный проводник с изогнутым наконечником для продвижения катетера через сосудистую сеть вдоль всего пути – от бедренной до мозговой артерии, где находится аневризма. Однако эта технология не всегда оптимальна даже для теоретически доступных аневризм: при удалении проволочного проводника из сосудов перед началом лечения могут возникнуть проблемы. «Как только проводник будет извлечен, катетер вернется к своей исходной форме, часто прямой, что приведет к потере доступа к патологии», – пояснила доктор Джессика Вен, участвовавшая в исследовании.
Новейшая технология использует другой подход, что позволяет хирургу управлять движением наконечника с помощью портативного контроллера, создающего давление жидкости для управления гидравлической системой, установленной внутри устройства. Гидравлическая жидкость представляет собой простой физиологический раствор, безопасный в случае какой-либо утечки.
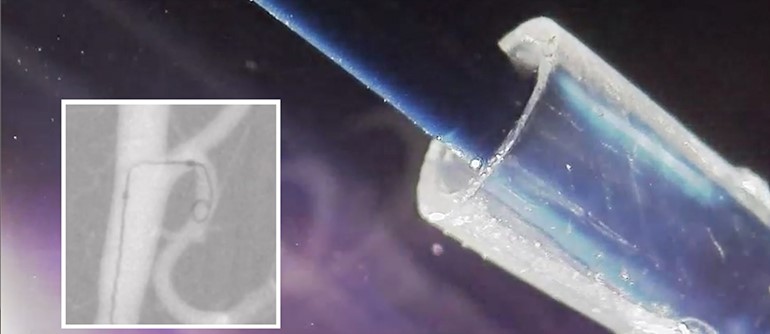
На фото: Флюороскопическое изображение управляемого катетера, проходящего по артерии мозга свиньи и устанавливающего в ней кольца спирали.
Конструкция катетера основана на устройстве структур, встречающихся в природе. «Нас вдохновляли жгутики и ноги насекомых, а также спаривание жуков, в котором задействована микромасштабная гидравлика и большая пространственная деформация, – сказал Гопеш Тилвавала, еще одни ученый, участвовавший в исследовании. – Это привело нас к созданию мягкого роботизированного микрокатетера с гидравлическим приводом».
На данный момент исследователи протестировали эту технологию на свиньях и надеются вскоре перейти к исследованиям на людях.
Оригинал новости можно прочитать здесь



